CAN-FD 收发器
所有 ECU 均采用相同的 CAN-FD 物理层(PHY)设计,该设计基于一款简单的 CAN-FD 收发器 IC,并辅以旁路电容。该收发器从 5V 电源线(VDD)获取供电,但通信时使用 3.3V 电压(Vio)。
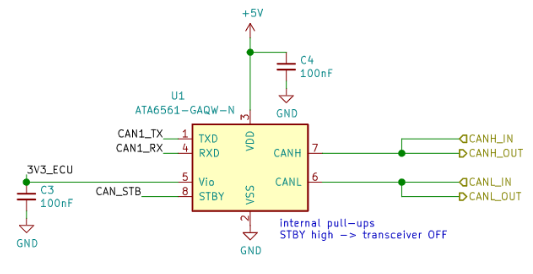 ECU 所使用的 CAN-FD 物理层
ECU 所使用的 CAN-FD 物理层
大多数 CAN 收发器 IC 采用相同的封装和布局,因此可以互换使用。我们使用以下任一组件构建了原型:
- ATA6561-GAQW-N(BETA)。该产品适用于汽车应用(AEC-Q100 认证),但其比特率限制为 5 Mbps。
- MCP2558FD-H/SN(V1)。其最大比特率为 8 Mbps,但目前尚未通过 AEC-Q100 认证(?)。
我们首选 MCP2558FD-H/SN,因为它具有更高的最大比特率。
该 PHY 芯片配备了一个“STBY”(待机)或“S”(静默)引脚,用于禁用收发器:
- 当 STBY/S 引脚为高电平时,收发器被禁用,ECU 将无法在 CAN-FD 总线上进行通信。
- 当 STBY/S 为低电平时,收发器被启用,ECU 即可在 CAN-FD 总线上进行通信。
STBY/S 引脚内置上拉电阻,这意味着必须主动将 STBY/S 引脚置为低电平才能使能通信。在典型设计中,建议将 STBY/S 保持上拉状态,以确保未编程的 ECU 不会干扰 CAN-FD 总线。然而,由于 RAMN 利用 CAN-FD 总线从(未编程的)出厂状态对 ECU 进行编程,因此 STBY/S 引脚需通过外部下拉,以允许硬件内置的引导程序通过 CAN-FD 进行通信。
注意
当 ECU 未使用时,建议将其编程为禁用其 CAN-FD 收发器。